WebGL简易教程(五):图形变换(模型、视图、投影变换)
1. 概述
通过之前的教程,对WebGL中可编程渲染管线的流程有了一定的认识。但是只有前面的知识还不足以绘制真正的三维场景,可以发现之前我们绘制的点、三角形的坐标都是[-1,1]之间,Z值的坐标都是采用的默认0值,而一般的三维场景都是很复杂的三维坐标。为了在二维视图中绘制复杂的三维场景,需要进行相应的的图形变换;这一篇教程,就是详细讲解WebGL的图形变换的过程,这个过程同样也适合OpenGL/OpenGL ES,甚至其他3D图形接口。
可以用照相机拍摄照片来模拟这个图形变换的过程,如果要对某个物体拍摄照片,大致过程如下:
准备物体,把物体放置在某个合适的位置;这个过程就是模型变换(model transform)。
准备照相机,把照相机移动到准备拍摄的位置;这个过程就是视图变换(view transform)。
设置相机的焦距,或者调整缩放比例;这个过程就是投影变换(projection transform)。
对结果图形进行拉伸或者挤压,确定最终照片的大小;这个过程就是视口变换(viewport transform)。
而在WebGL/OpenGL中,具体的图形变换流程如下所示[3]:
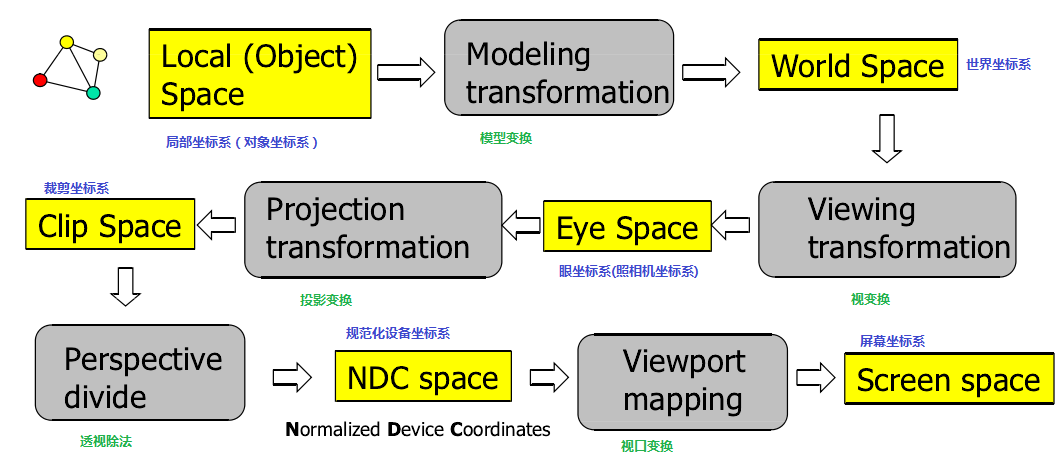
其中模型变换、视图变换、投影变换是我们自己在着色器里定义和实现的,而视口变换一般是WebGL/OpenGL自动完成的。这就好像我们拍照的时候,需要自己去调整位置,相机镜头焦距,而成像的过程就交给相机。所以模型变换、视图变换、投影变换这三者特别重要,另外附一张WebGL/OpenGL矩阵变换的流程图[4]:

从上两图中可以发现,场景中的物体总是从一个坐标系空间转换到另外一个坐标系空间。
局部坐标系(Local Space)指的是物体最初开始的坐标系;而世界坐标系(World Space)指的是物体与WebGL/OpenGL相机建立联系时的坐标系。这里的局部坐标系与世界坐标系跟通常意义的不同,只有与WebGL/OpenGL相机建立了联系,才是这里规定的世界坐标系。为了建立联系,经过的就是模型变换。
进入世界坐标系空间之后,物体与WebGL/OpenGL相机虽然建立了联系,但是并没有进一步确定观察物体的状态。这个时候就需要调整相机位置姿态,也就是视图变换,转换成视图坐标系(View Space),也可以简称为人眼坐标系(Eye Space),或者照相机坐标系(Camera Space)。
在人眼坐标系空间中,虽然物体就在眼前了,但是还需要进一步去确定可视空间。就像人眼是把水平视角大约200度左右的场景投影到视网膜中,人才能看清物体的那样,WebGL/OpenGL需要经过投影变换,才能正确的显示场景。这个过程通常还顺带进行了场景的裁剪,将可视空间范围外的东西去掉,所以投影变换后的坐标系就是裁剪坐标系(Clip Space)。
最后一步就是通过视口变换,从裁剪坐标系转换成屏幕坐标系,得到渲染结果。这一步由WebGL/OpenGL自动完成。
在参考文献[2]中描述的WebGL/OpenGL整个图形变换过程的坐标系和单位:
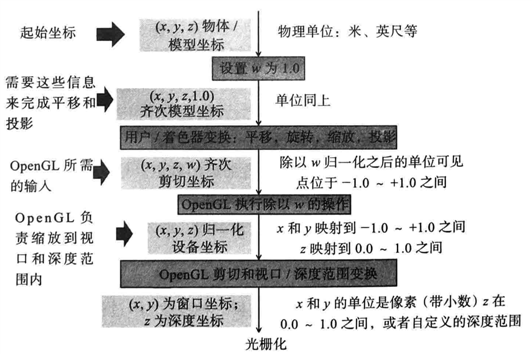
其流程与前文论述的基本一致,可以看到投影变换之后的过程不是那么简单,还需要将得到的齐次裁剪坐标做透视除法(除以w),做剪切和视口/深度范围变换,光栅化等。
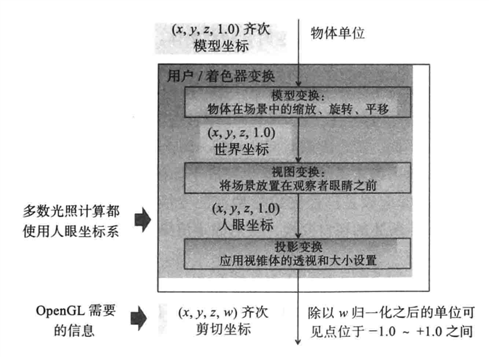
其中,用户/着色器变换(也就是教程要具体详述的模型变换、视图变换和投影变换)包含坐标系和单位如下所示:
在一个三维软件中浏览一个三维物体时候,总是会提供给用户平移、缩放和旋转的交互操作,而这正是模型变换的内容。在图形学的范畴当中,平移变换、旋转变换属于刚体变换,缩放和旋转属于线性变换,刚体变换和线性变换又属于仿射变换,而仿射变换也可以看成投影变换的一种[5]。
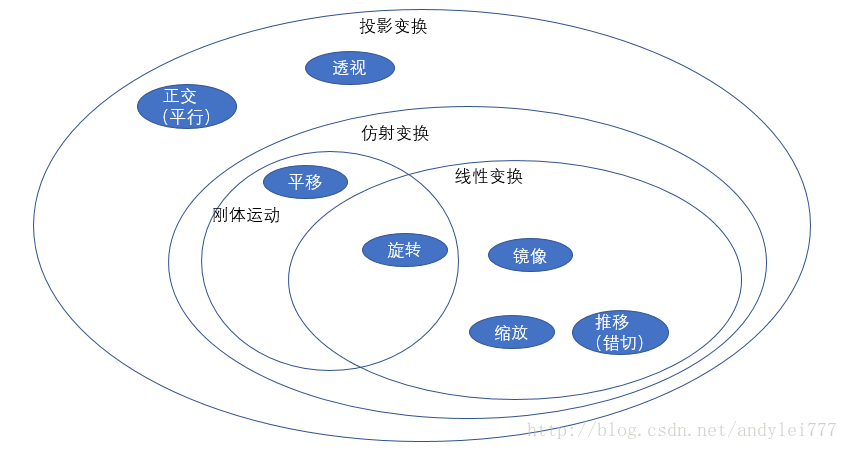
也就是说这些图形变换,本质上可以看成是同一种变换;在数学上,可以使用矩阵来描述这种变换。并且,为了兼容各种变换的特殊性,会在3维的基础上再加一维,使用4维的向量和矩阵。4维向量表述一个点(x,y,z,w)等价于三维向量(x/w,y/w,z/w),这就是前面提到的齐次坐标。
具体来说,对于空间某个点v0(x0,y0,z0,1),经过空间图像变换后得到新的点v1(x1,y1,z1,1),那么存在这样一个4行4列的矩阵M:
温馨提示: 本文由Jm博客推荐,转载请保留链接: https://www.jmwww.net/file/web/8592.html
![[转]Node.js中package.json中^和~的区别](/uploads/allimg/200519/054J34453_lit.png "[转]Node.js中package.json中^和~的区别")